


RB27 och RB28

Visas på Robotmuseet
Robot RB27 och RB28 tillhör den amerikanska Falconfamiljen och är utvecklade av grundversionen Air Interception Missile 26 och AIM-4. Den hade sitt ursprung i USA och 1955 inleddes leverans till US Navy för beväpning av flygplanen F9F Cougar och FJ3 Fury samt senare även USAF för beväpning av F102 Delta Dagger, F106 Delta Dart och F4 Phatom II.
Sverige började förhandla med USA redan 1958 om att få köpa versionerna GAR-1 med semiaktiv radarmålsökare och GAR-2 med IR-målsökare. Falconrobotarna och ett Radarsiktessystem (Fire Control System FCS) anpassat för dessa utvecklades av Hughes Airkraft Company, HAC. Robotarna fanns i fem versioner och förutom de ovan nämnda också GAR-11 med semiaktiv radarmålsökare och kärnladdning, GAR-3 med semiaktiv radamålsökare (dyrare utförande) och GAR-4 med IR-målsökare arbetande på 3-4 µm våglängd. Sverige valde som radarrobot GAR-11 med konventionell verkansdel (stridsdel) och nytt ZON-rör . Den fick av HAC benämningen HM-55 och i Flygvapnet RB27. Som IR-robot valdes GAR-2 med målsökaren från GAR-4. Den fick av HAC benämningen HM-58 och i FV RB-28. Dessa versioner köptes även av USAF under beteckningen AMI-26B (RB27) resp AMI-4C (RB28).
Jaktrobot RB 27

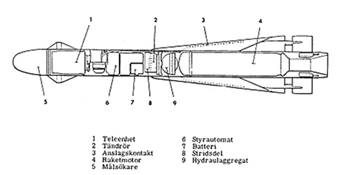
RB 27 anskaffades till flygvapnet för bekämpning av snabbt flygande bombflygplan på hög höjd och på långa avstånd i alla väder och i mörker. RB27 var försedd med en radarekodetekterande passiv (semiaktiv) målsökare anpassad till det bärande flygplanets Siktesradar PS-01/011. Robotens målsökare och styrsystem kunde leda roboten i en kollisionsbana mot en beräknad träffpunkt, d.v.s. enligt principen syftbäringsnavigering (även kallad proportionell navigering) samt att kontinuerligt korrigera denna bana med hänsyn till målet fart-, kurs- och höjdändringar. Roboten avfyrades normalt under ett av flygplanets Radarsikte S-7B3/31 beräknat Direktanfall DA med ett eventuellt efterföljande Jaktkurveanfall JK (s.k. dubbelanfall). Målsökaren fordrade radarbelysning av målet med flygplanets siktesradar alternativt styra med hjälp av störsignaler av brus- eller CW (Continuerlig Waw)-typ från målet under gångtiden mot detsamma. Roboten styrdes aerodynamiskt med bakkantsroder på vingar och korrigerades för störningar i alla plan med en styrautomat. Robotens avionik bestod av miniatyrkomponenter där elektronrör av subminiatyrtyp ingick. Som kraftkälla användes dels anpassad elförsörjning från det bärande flygplanet samt efter omkoppling till ”Inre kraft” med ett irreversibelt snabbaktiverande batteri och hydraulsystem. Före avfyringen måste roboten prepareras, vilket gjordes i steg benämnda A-, B-, C- och F-preparering och bestämdes av siktet. Dessa berörde valet av robot och kraftförsörjningen men även när och hur målsökaren skulle slavas till flygradarns frekvens och avståndsinmätning samt radarantennens pekriktning.
Roboten drevs fram av en enstegs krutraketmotor. Verkansdelen bestod av en stridsdel med zikzaklänk som initierades från ett aktivt radarzonrör eller av anslagskontakter. Roboten hängdes i en Robotbalk F5 med vilken flygplanet genom kabling och sänkbar kontakt försörjde målsökarens avionik innan avfyring.
RB27 licenstillverkades i Sverige av Bofors och SAAB samt LM Ericsson och började tillföras svenska FV 1965.
Data, Prestanda
| Längd | 2 169m |
| Stridsladdning | 6,6 kg |
| Spännvidd | 0,620 m |
| Armeringsvillkor | Acceleration >40 g i <0,8 s |
| Vikt | 116,5 kg |
| Armeringstid | 1,2 – 2,2 sek |
| Fördröjd Zonrörsinitiering BAK-anfall | 9 ms |
| Självdestruktion | 27 sek |
| Motorkraft vid 20 gr | 25000 N |
| Motor brinntid | 2,0 sek (krut) |
| Max styrd flygtid på flyghöjd 3,0 km | ca 14 sek |
| Min fart för styrbar flygning | M 1,0 |
| Max fart över flygplanets | M 1,4 |
| Målsökarens frekvensområde | x-bandet (8 – 12,5 GHz) |
| Målsökarlobbredd | |
| Stillastående | 25 grader |
| Vid rotation | 50 grader |
| Målsökarens max utvridningsvinkel | 45 grader |
| Målsökarens max precisionshastighet | 6 grader/s |
| Målsökarens slavninghastighet | ca 10 grader/s |
| Batterikapacitet | 0,7 Ah |
| Max uttagbar batteritid | ca 90 s |
Vapenbärare: J35F och J35J
Jaktrobot RB28

RB28 anskaffades till flygvapnet tillsammans med RB27. Avsikten var att i första hand användas för bekämpning av bombflygplan på hög höjd i klart väder inom synhåll eller i mörker. RB28 var försedd med en passiv kraftigt kyld IR-känslig målsökare med en detektor av indium/antimonid. Materialet och kylningen medgav ett IR-fönster inom en våglängd för detektering av relativt låg värme som medförde följning på målet i nästan alla riktningar samt mindre påverkan av störning. Robotens målsökare och styrsystem kunde liksom RB27 leda roboten i en kollisionsbana mot en beräknad träffpunkt, d.v.s. enligt principen syftbäringsnavigering samt att kontinuerligt korrigera denna bana med hänsyn till målet fart-, kurs- och höjdändringar. Roboten avfyrades normalt under ett siktesberäknat Direktanfall DA med ett eventuellt efterföljande Jaktkurveanfall JK (s.k. dubbelanfall). Som alternativ kunde den avfyras med målsökaren låst och parallell med flygplanets siktlinje vid visuell inriktning.
Målsökaren fordrade IR-signal från målets varma delar under gångtiden mot detsamma. Roboten styrdes aerodynamiskt med bakkantsroder på vingar och korrigerades för störningar i alla plan med en styrautomat. Robotens avionik bestod av miniatyrkomponenter där elektronrör av subminiatyrtyp ingick. Som kraftkälla användes dels anpassad elförsörjning från det bärande flygplanet samt efter omkoppling till ”Inre kraft” med ett irreversibelt snabbaktiverande batteri och kylsystem samt hydraulsystem. Före avfyringen måste roboten prepareras, vilket gjordes i steg benämnda A-, B-, C- och F-preparering och bestämdes av siktet. Dessa berörde valet av robot och kraftförsörjningen men även när och hur målsökaren skulle slavas till radarantennens pekriktning eller siktets riktmärke.
Roboten drevs fram av en enstegs krutraketmotor. Verkansdelen bestod av en stridsdel som initierades av anslagskontakter. Roboten hängdes i en Robotbalk (samma som RB27) med vilken flygplanet genom kabling och sänkbar kontakt försörjde målsökarens avionik innan avfyring.
RB28 licenstillverkades i Sverige av Bofors och SAAB samt LM Ericsson och började tillföras flygvapnet FV 1965.
Data, Prestanda
| Längd | 2 012m |
| Stridsladdning | 1,3 kg |
| Spännvidd | 0,508 m |
| Armeringsvillkor | Acceleration >20 g i 0,4 – 0,7s |
| Vikt | 61 kg |
| Armeringstid | 1,0 – 2,0 sek |
| Självdestruktion | 25 sek |
| Motorkraft vid 20 gr | 18800 N (krut) |
| Motor brinntid vid 20 gr | 1,3 sek |
| Max styrd flygtid på flyghöjd 3,0 km | ca 12 s |
| Min fart för styrbar flygning | M 1,0 |
| Max fart över flygplanets | M 1,4 |
| Målsökarens våglängdsområde | 3,84 – 5,5 µm |
| Målsökarlobbredd | |
| Stillastående | 3,5 grader |
| Vid rotation | 6,3 grader |
| Målsökarens max utvridningsvinkel | 47 grader |
| Målsökarens max precisionshastighet | 6 grader/s |
| Målsökarens slavninghastighet | ca 10 grader/s |
| IR-cellens arbetstemperatur | -180grader C |
| Max uttagbar kyltid | Ca 60 – 80s |
| Max uttagbar batteritid | ca 90 s |
Vapenbärare: J35F och J35J
Sammanställt av Göran Hawée
Artikeln finns även som pdf-fil
Källor:
Beskrivning RB27 och RB28
Speciell Förarinstruktion SFI FPL 35F och FPL 35 J, del 3.
Flygteknik under 100 år SMR förlag, 2003